The proliferation of robots like Boston Dynamics’ Spot has showcased the versatility of quadrupeds. These systems have thrived at walking up stairs, traversing small obstacles, and navigating uneven terrain. Ladders, however, still present a big issue — especially given how ever present they are in factories and other industrial environments where the systems are deployed.
ETH Zurich, which has been behind some of the most exciting quadrupedal robot research of recent vintage, has demonstrated a path forward. As the school notes, past attempts at tackling ladders have mostly involved bipedal humanoid-style robots and specialty ladders, while ultimately proving too slow to be effective.
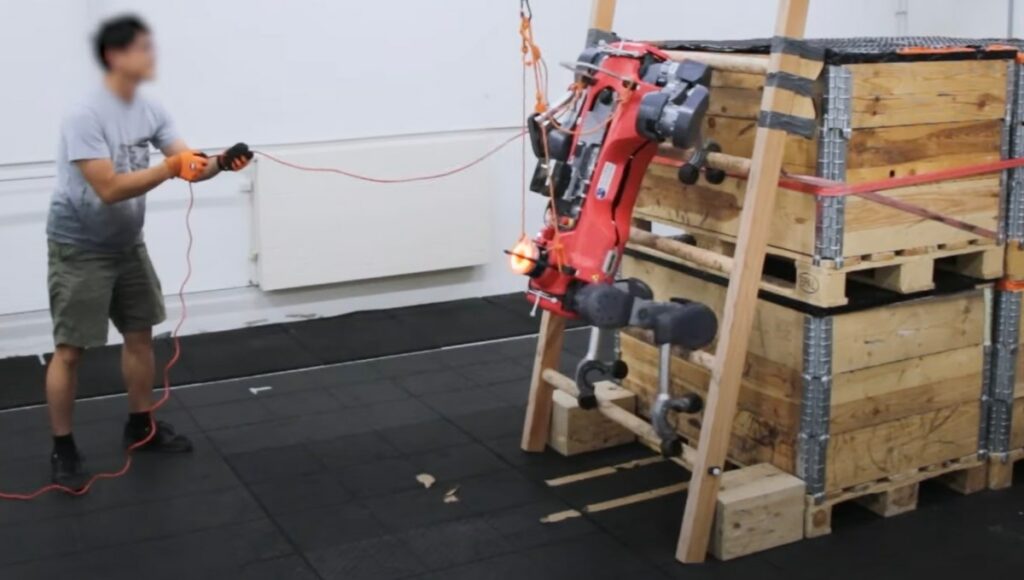
The research found the school once again utilizing the ANYMal robot from its spinoff, ANYbotics. Here, the team outfitted the quadruped with specialty end effectors that hook onto ladder rungs. The real secret sauce, however, is reinforcement learning, which helps the system adjust to the peculiarities of different ladders.
“This work expands the scope of industrial quadruped robot applications beyond inspection on nominal terrains to challenging infrastructural features in the environment,” the researchers write, “highlighting synergies between robot morphology and control policy when performing complex skills.”
The school says the combined system had a 90% success rate navigating ladder angles in the 70- to 90-degree range. It also reports a climbing speed increase of 232x versus current “state-of-the-art” systems.
The system can correct itself in real-time, adjusting its climb instances in which it has misjudged a run or incorrectly timed a step.

