Wander the pits at any professional motorsports event, especially something like Formula 1, and you’ll see endless computer displays full of telemetry. Modern teams are awash in real-time digital feedback from the cars. I’ve been in many of these pits over the years and marveled at the streams of data, but never have I seen an instance of the Microsoft Visual Studio software development suite running there right amid the chaos.
But then, I’ve never attended anything like the inaugural Abu Dhabi Autonomous Racing League event this past weekend. The A2RL, as it is known, is not the first autonomous racing series: There’s the Roborace series, which saw autonomous race cars setting fast lap times while dodging virtual obstacles, and the Indy Autonomous Challenge, which most recently ran at the Las Vegas Motor Speedway during CES 2024.
While the Roborace focuses on single-car time trials and the Indy Autonomous series centers on oval action, A2RL set out to break new ground in a couple of areas.
A2RL put four cars on track, competing simultaneously for the first time. And, perhaps more significantly, it pitted the top-performing autonomous car against a human being, former Formula 1 pilot Daniil Kvyat, who drove for various teams between 2014 and 2020.
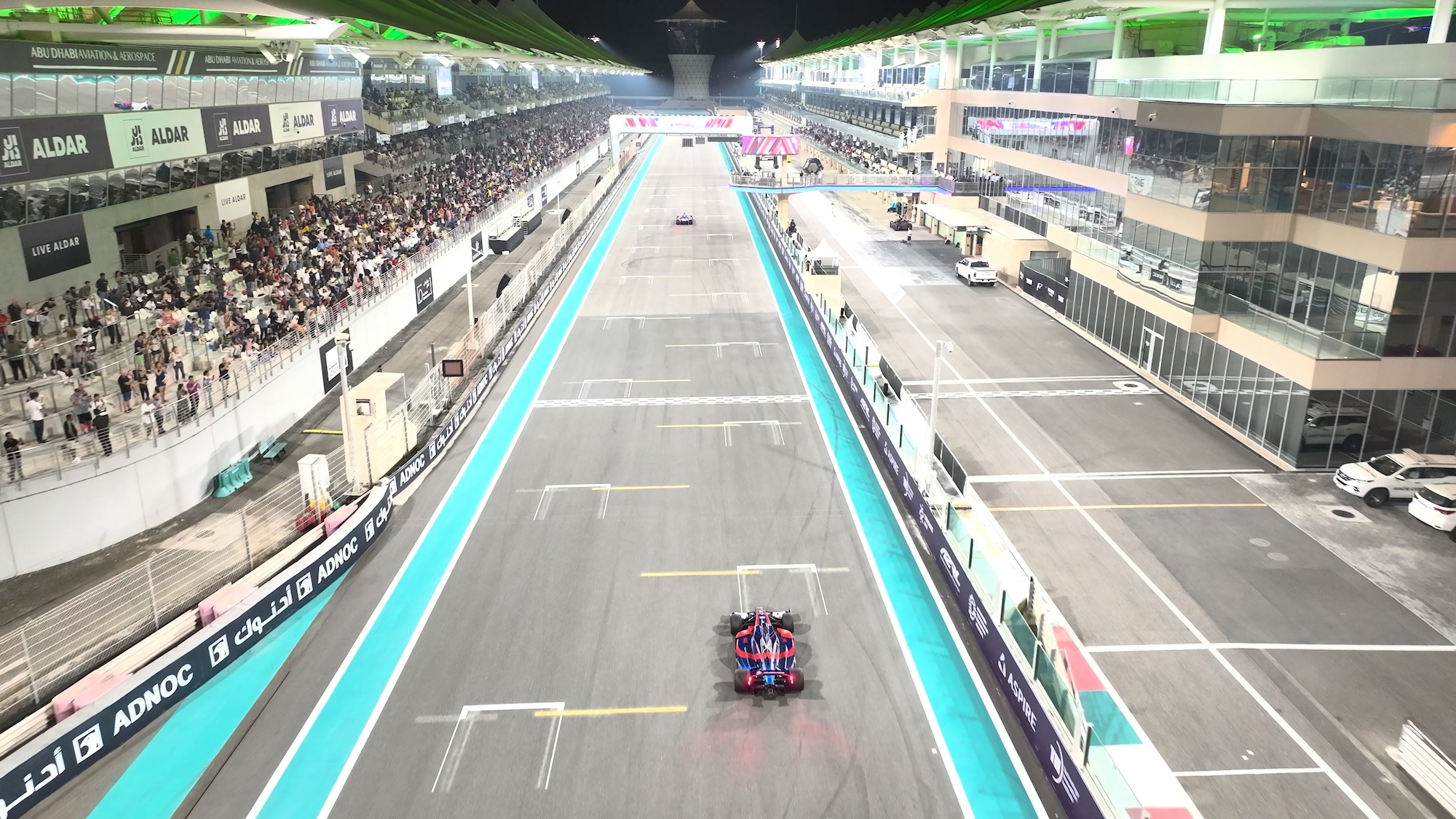
Image Credits: Autonomous Racing League
The real challenge was behind the scenes, with teams staffed with an impressively diverse cadre of engineers, ranging from fledgling coders to doctorate students to full-time race engineers, all fighting to find the limit in a very new way.
Unlike Formula 1, where 10 manufacturers design, develop and produce completely bespoke cars (sometimes with the help of AI), the A2RL race cars are entirely standardized to provide a level playing field. The 550-horsepower machines, borrowed from the Japanese Super Formula Championship, are identical, and the teams are not allowed to change a single component.
That includes the sensor array, which features seven cameras, four radar sensors, three lidar sensors and GPS to boot — all of which are used to perceive the world around them. As I would learn while wandering the pits and chatting to the various teams, not everybody is fully tapping into the 15 terabytes of data each car hoovers up every single lap.
Some teams, like the Indianapolis-based Code19, only started work on the monumental project of creating a self-driving car a few months ago. “There’s four rookie teams here,” said Code19 co-founder Oliver Wells. “Everyone else has been competing in competitions just like this, some of them for up to seven years.”
It’s all about the code

Image Credits: Tim Stevens
Munich-based TUM and Milan-based Polimove have extensive experience running and winning in both Roborace and the Indy Autonomous Challenge. That experience carries over, as does the source code.
“On the one hand, the code is continuously developed and improved anyway,” said Simon Hoffmann, team principal at TUM. The team made adjustments to change the cornering behavior to suit the sharper turns in the road course and also adjust the overtaking aggression. “But in general, I would say we use the same base software,” he said.
Through the series of numerous qualifying rounds throughout the weekend, the teams with the greatest experience dominated the timing charts. TUM and Polimove were the only two teams to complete lap times in less than two minutes. Code19’s fastest lap, however, was just over three minutes; the other new teams were far slower.
This has created a competition that’s rarely seen in software development. While there have certainly been previous competitive coding challenges, like TopCoder or Google Kick Start, this is a very different sort of thing. Improvements in code mean faster lap times — and fewer crashes.
Kenna Edwards is a Code19 assistant race engineer and a student at Indiana University. She brought some previous app development experience to the table, but had to learn C++ to write the team’s antilock braking system. “It saved us at least a couple of times from crashing,” she said.
Unlike traditional coding problems that might require debuggers or other tools to monitor, improved algorithms here have tangible results. “A cool thing has been seeing the flat spots on the tire improve over the next session. Either they’ve reduced in size or in frequency,” Edwards said.
This implementation of theory not only makes for engaging engineering challenges but also opens up viable career paths. After earlier interning with Chip Ganassi Racing and General Motors, and thanks to her experience with Code19, Edwards starts full-time at GM Motorsports this summer.
An eye toward the future

Image Credits: Tim Stevens
That sort of development is a huge part of what A2RL is about. Shadowing the main on-track action is a secondary series of competitions for younger students and youth groups around the world. Before the main A2RL event, those groups competed with autonomous 1:8-scale model cars.
“The aim is, next year, we keep for the schools the smaller model cars, we’ll keep for the universities maybe doing it on go-karts, a bit bigger, they can play with the autonomous go-karts. And then, if you want to be in the big league, you start racing on these cars,” said Faisal Al Bannai, the secretary general of Abu Dhabi’s Advanced Technology Research Council, the ATRC. “I think by them seeing that path, I think you’ll encourage more guys to come into research, to come into science.”
It’s Al Bannai’s ATRC that’s footing the bill for the A2RL, covering everything from the cars to the hotels for the numerous teams, some of whom have been testing in Abu Dhabi for months. They also put on a world-class party for the main event, complete with concerts, drone races, and a ridiculous fireworks show.
The on-track action was a little less spectacular. The first attempt at a four-car autonomous race was aborted after one car spun, blocking the following cars. The second race, however, was far more exciting, featuring a pass for the lead when the University of Modena’s Unimore team car went wide. It was TUM that made the pass and won the race, taking home the lion’s share of the $2.25 million prize purse.
As for man vs. machine, Daniil Kvyat made quick work of the autonomous car, passing it not once but twice to huge cheers from the assembled crowd of more than 10,000 spectators who took advantage of free tickets to come see a little bit of history — plus around 600,000 more streaming the event.
The technical glitches were unfortunate. Still it was a remarkable event to witness and illustrated how far autonomy has come — and of course, how much more progress needs to be made. The fastest car was still upward of 10 seconds off of Kvyat’s time. However, it ran smooth, clean laps at an impressive speed. That’s in stark contrast to the first DARPA Grand Challenge in 2004, which saw every single competitor either crashing into a barrier or meandering off into the desert on an unplanned sojourn.
For A2RL, the real test will be whether it can evolve into a financially viable series. Advertising drives most motorsports, but here, there’s the added benefit of developing algorithms and technologies that manufacturers could reasonably apply in their cars.
ATRC’s Al Bannai told me that while the series organizers own the cars, the teams own the code and are free to license it: “What they compete on at the moment is the algorithm, the AI algorithm that makes this car do what it does. That belongs to each of the teams. It doesn’t belong to us.”
The real race, then, might not be on the track, but in securing partnerships with manufacturers. After all, what better way to inspire confidence in your autonomous technology than by showing it can handle traffic on the race track at 160 mph?