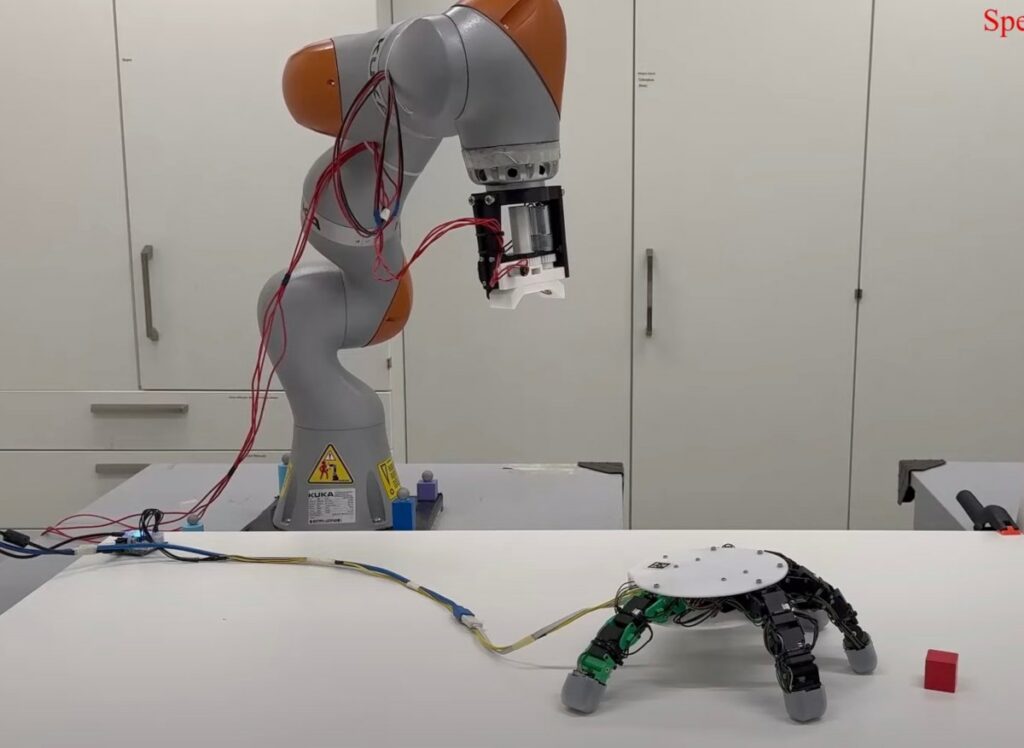
Research videos aren’t known for their narrative arcs. Occasionally, however, you see one that keeps getting better the longer you watch. “Beyond Manual Dexterity” is one such video. It wows you in the first few seconds with a highly dexterous robotic gripper, and then things start to go off the rails.
The video debuted along with a research paper of the same name at IEEE’s International Conference on Robotics and Automation in Rotterdam this week. The work, conducted by Switzerland’s EPFL, explores ways in which robotic hands can grow beyond existing confines to grasp an even wider range of objects.
“The deep learning model has significantly advanced dexterous manipulation techniques for multi-fingered hand grasping,” the team notes. “However, the contact information-guided grasping in cluttered environments remains largely underexplored.”
For decades, roboticists have looked to the natural world for inspiration. Today’s robots are very much built upon those foundations. Look no further than the quadrupeds and humanoids currently flooding the market. The biological is a rich and seemingly endless source of inspiration, but it can also cause designers to paint themselves into a corner.
But why does a robotic hand have to be constrained by the limitations of its natural counterpart? The prevailing answer may be a lack of imagination. The research on display here, however, points at what these systems look like when one intentionally breaks those bonds.
The results can be a bit creepy. Designing a human-inspired hand that can bend backward to pick up a broad range of objects and detach itself to crawl over to another firmly plants it inside the uncanny valley. If it didn’t look so much like a human hand in the first place, it would probably be less unsettling.

Operating in this world, however, requires one to push through that visceral reaction. Beyond it you’ll find a compelling way forward for robotics grasps. Whether something like this can be successfully scaled is another question. For now, the research is no doubt piquing plenty of interest in the field.
“Although you see it in scary movies,” researcher Xiao Gao cheekily told IEEE, “I think we’re the first to introduce this idea to robotics.”
So long, biologically inspired robots; hello, horror bots.